1 / 3
1 / 3Applicazione pick & place basata sulla visione con pinza rotante




Prezzo dell'hardware:
Flexibility
high
Precision
High
DOF
3
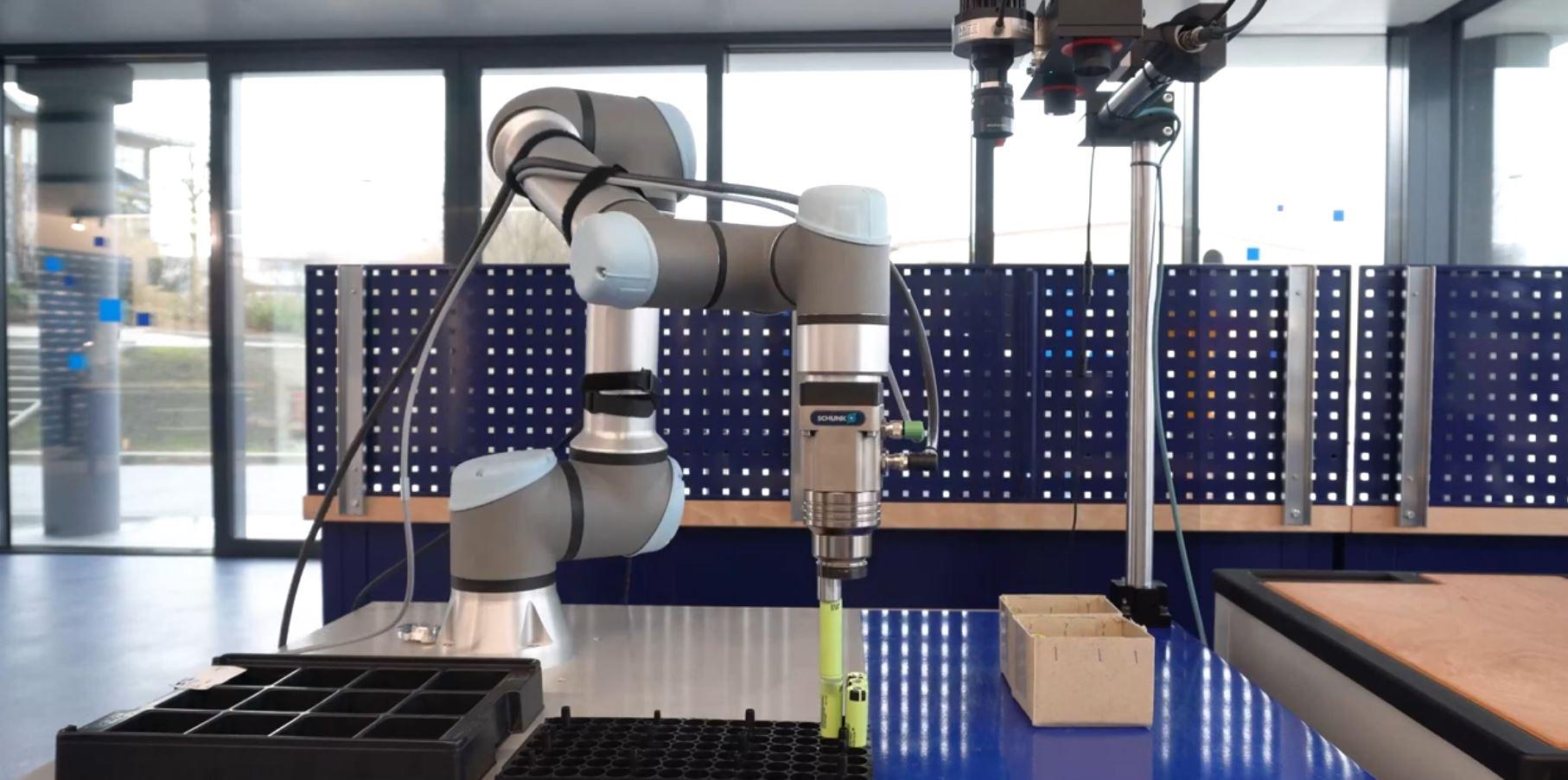
Questo video presenta una configurazione di prova del cliente in cui piccoli componenti vengono spostati su un nastro trasportatore in una cella robotizzata.
All'inizio del video, vediamo come vengono posizionati i piccoli componenti sul primo nastro trasportatore. Vengono quindi trasportati nella cella del robot. Una telecamera posizionata strategicamente nella cella rileva l'esatta posizione delle parti sul nastro.
Una volta che la telecamera ha catturato le coordinate delle parti, queste informazioni vengono trasmesse a un Delta robot montato sulla parte superiore. Questo robot è dotato di una pinza rotante pneumatica che afferra i pezzi con precisione.
Il Delta robot si muove quindi, controllato dalle coordinate fornite dalla telecamera, e posiziona sempre le parti con lo stesso orientamento sul secondo nastro trasportatore.
Il video si conclude con un primo piano delle parti correttamente posizionate sul secondo nastro trasportatore. Questo processo dimostra la precisione e l'efficienza della cella robotica nella manipolazione di piccoli componenti.
Per riassumere, questo video è un'eccellente rappresentazione dell'applicazione della moderna tecnologia robotica nella produzione e nell'assemblaggio. Mostra come sia possibile ottenere una gestione efficiente e precisa di piccoli componenti attraverso l'uso di telecamere, robot delta e pinze rotanti pneumatiche.
4 Componenti